Collaborative robots (Cobots) are being used more and more frequently in electronics manufacturing. These robots are, however, designed to perform one specific task at a time, with task-switching only possible by changing the robot’s manipulator manually. This tool holder enables a Cobot to pick up and use tools without assistance, enabling multiple tasks to be performed via an automated setup.
START:IP
Technology Abstract
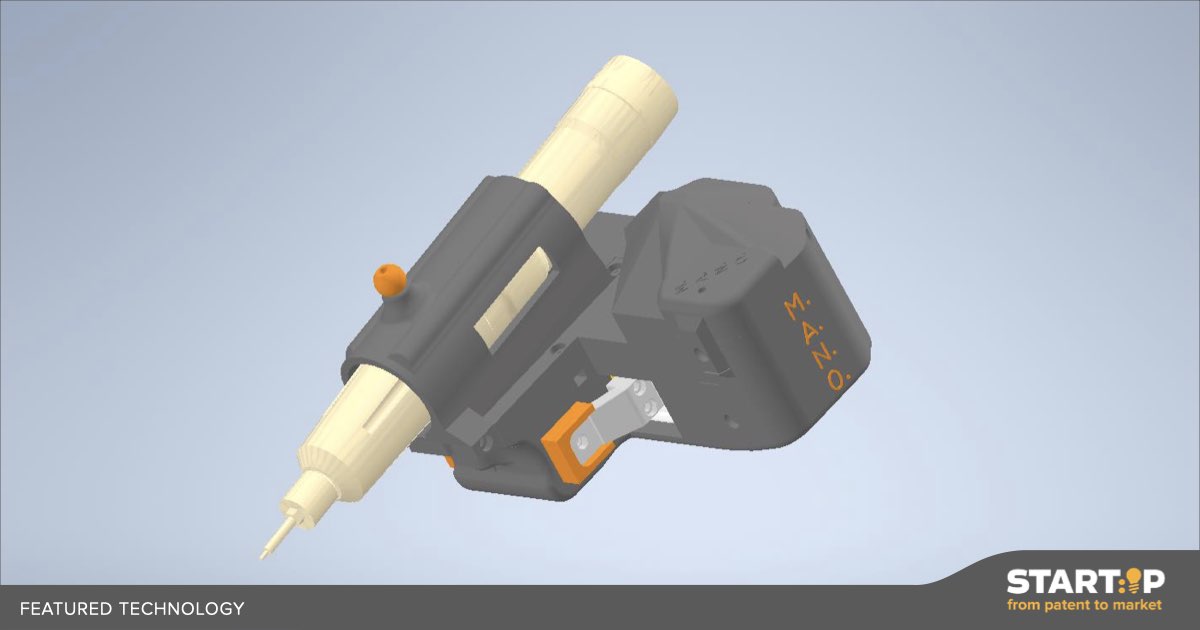
Tool Holder for Collaborative Robot
Detachable Tool Holder for Collaborative Robot
Bookmark4
The tool holder enhances the functionality of already existing robots that perform their tasks via a “pick up and place” mechanism, mediated by a so-called jaw gripper. So long as the tool holder is within the arm’s reach of the robot, the robot can pick it up and then use the tool. The tool holder has two critical functionalities – first, there is a locking mechanism that is activated when the robot picks up the tool holder and is not released until the robot returns the tool holder to its original position; second, the tool holder activates the tool held inside in order to perform the task. This second functionality couples the movement of the gripper to the activation switch of the tool. The mechanism is entirely mechanic, meaning there is no need for any extra electronics or software.
The tool holder can be customized for any battery-powered tool, and multiple different tools could be used simply by having them within the access range of the robot – i.e. the robot can pick up and use one tool, and then change to a second tool without any manual assistance. Tool sharing is even possible between two robots, or with a human, in overlapping workspaces. The holder itself is 3D printed, meaning new designs for new tools could be very quickly produced. Overall, the tool holder enables greater efficiency in manufacturing processes, by enhancing the automation capabilities of Cobots.
The tool holder can be customized for any battery-powered tool, and multiple different tools could be used simply by having them within the access range of the robot – i.e. the robot can pick up and use one tool, and then change to a second tool without any manual assistance. Tool sharing is even possible between two robots, or with a human, in overlapping workspaces. The holder itself is 3D printed, meaning new designs for new tools could be very quickly produced. Overall, the tool holder enables greater efficiency in manufacturing processes, by enhancing the automation capabilities of Cobots.
If you click the button and fill out the form to be “matched” with a technology, we will introduce you to the scientist / transfer manager of the respective research institution. In this way, you immediately have the chance to receive more detailed information and to start discussions about a possible joint project.