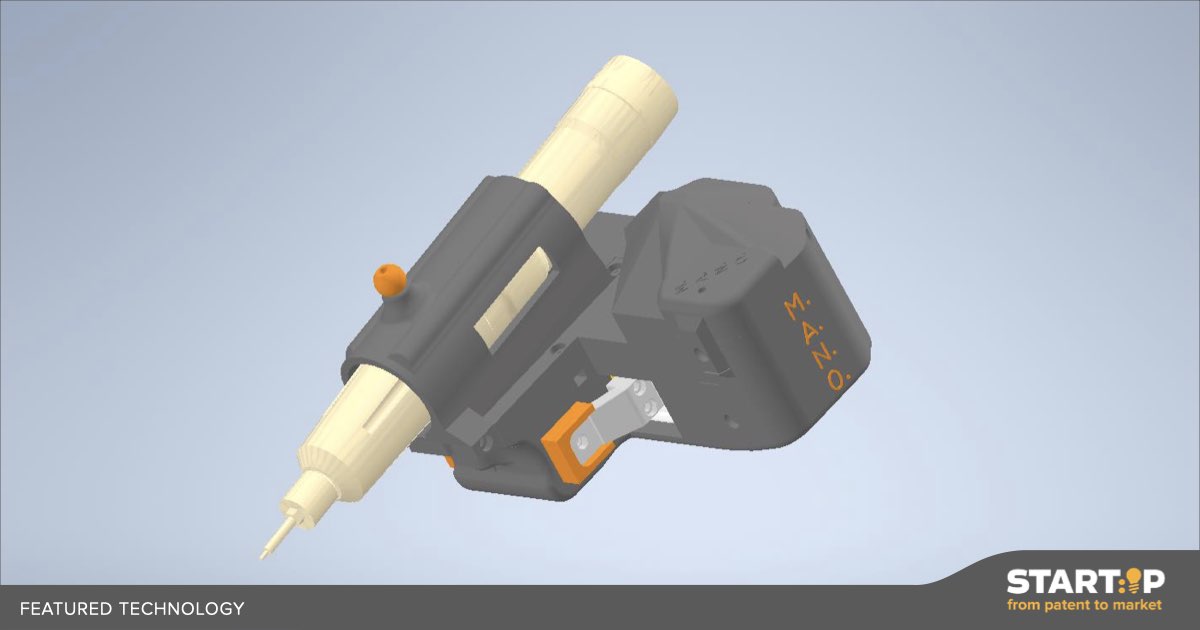
Collaborative robots (Cobots) are being used more and more frequently in electronics manufacturing. These robots are, however, designed to perform one specific task at a time, with task-switching only possible by changing the robot’s manipulator manually. This tool holder enables a Cobot to pick up and use tools without assistance, enabling multiple tasks to be performed via an automated setup.
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren